Adam Parker had a perfect 4.0 grade point average when he transferred from NAIT to the University of Alberta for his undergraduate degree in electrical engineering. But he wasn't always an A student.
In fact, as a kid, "I mostly couldn't be bothered with academics. I just wanted to play," he says. "And so I would put in the bare minimum effort required to get through school and do as much playing and video games and hanging out with my friends as I could."
Parker's favourite game as a teen was a tabletop fantasy role-playing game called Shadowrun that involves heroes with bionic limbs battling evil tycoons in a dystopian near-future.
That's why it seemed like a perfect fit when he met medicine professor Patrick Pilarski and learned about the Bionic Limbs for Improved Natural Control (BLINC) Lab. Parker spent the next 11 years "playing" with bionic limbs, first as an undergraduate summer researcher, and ultimately earning himself a PhD in rehabilitation science through the Faculty of Rehabilitation Medicine, to be awarded during fall convocation next week.
U of A students will shape the future. You can help.
With your support, the next generation of change makers can access the resources, experiences and student spaces they need to tackle today's challenges and shape a brighter tomorrow.
Parker's research findings flip our conventional understanding of the role of artificial intelligence in developing bionic limbs: Instead of focusing on how AI can be used to teach the artificial limb its moves, Parker is developing and testing ways for limbs to learn from and give feedback to individual users in real time … in other words, to collaborate with their human users.
"Adam has changed my thinking — and that of our international community — as to how intelligent machines can be better partners and collaborators," explains Pilarski, who is a Canada CIFAR Artificial Intelligence Chair, past Canada Research Chair in Machine Intelligence for Rehabilitation, professor in the Division of Physical Medicine and Rehabilitation and adjunct professor in the Faculty of Rehabilitation Medicine, and an Alberta Machine Intelligence Institute (Amii) fellow.
"Thanks to Adam's research, the fields of rehabilitation medicine and assistive technology have been able to appreciate how machine learning might impact the continually evolving relationship between humans and machines that are tightly coupled to the user's activities of daily living."
A partner rather than just a tool
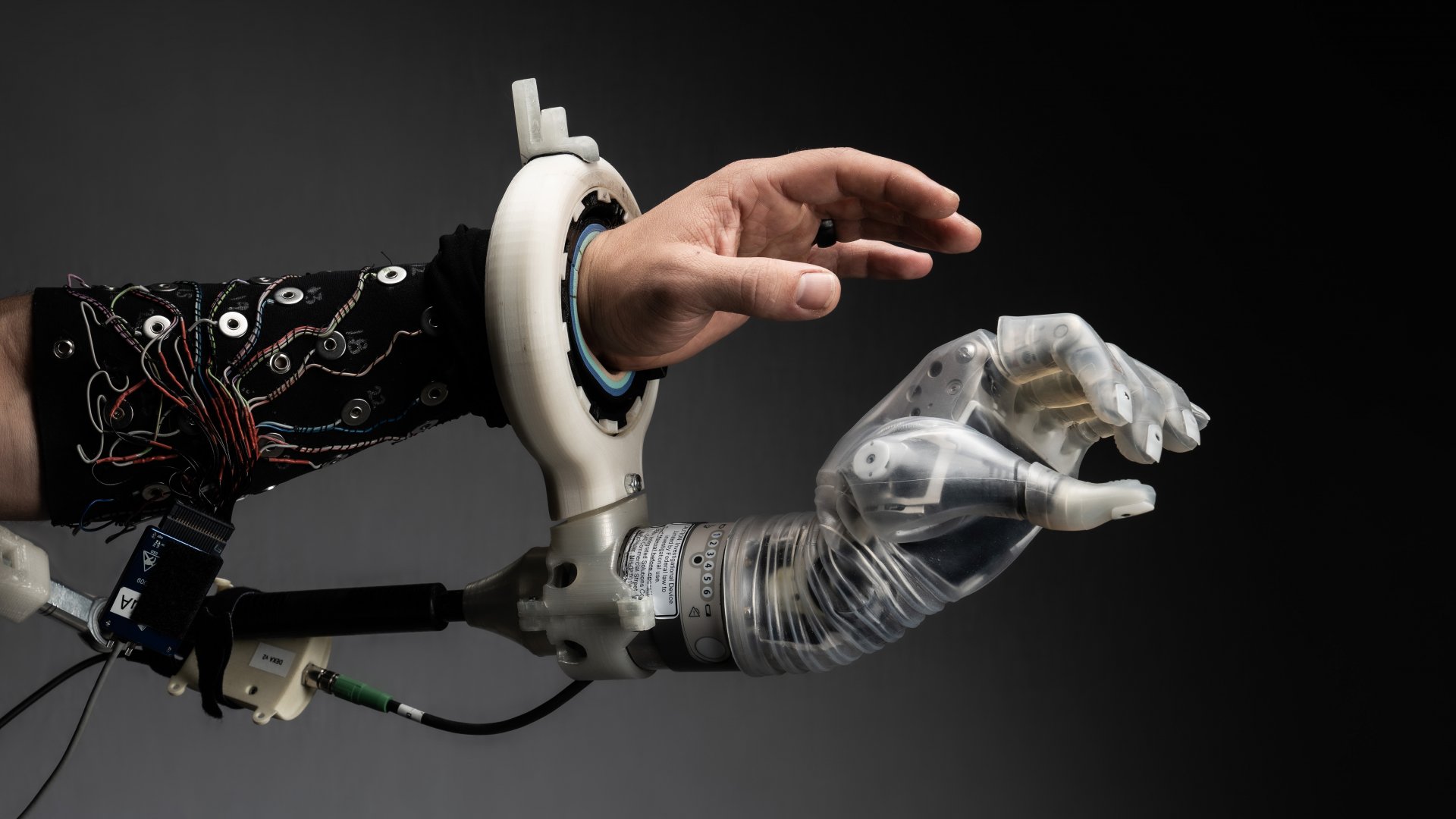
The central experiment in Parker's thesis was entitled "Understanding Human Interaction With Real-Time Adaptive Feedback During Simulated Prosthesis Use." He asked two groups of able-bodied participants to use a physical simulation of an arm prosthesis to move a flexible plastic cup without crushing it. Powered by electric motors, the prosthesis is controlled by the user flexing their forearm muscles, sending signals via electrodes attached to the surface of their skin. None of the participants was an expert user, so it was a difficult task to accomplish.
All 16 of the participants performed the cup moving task on their own first, without any feedback from the prosthesis, simply using their own senses — what they could see and hear — to guide them. This is how commercially available prostheses currently work for people with amputated limbs.
Half of the participants then performed the task while getting direct feedback from the arm. It was programmed to make a beeping sound whenever a certain level of force — enough to crush the cup — was exceeded.
The second group of participants worked with an arm that was guided by a prediction learning algorithm. It didn't know at what load the cup would be crushed until it had experienced that once. Then it set out to help the user by warning them with an audible signal before they reached that critical load.
There were a lot of crushed cups at the end of the experiment, but accomplishing the task wasn't really the point. Parker used a mixed methods approach to analyze his results, including quantitative data from the experiments and qualitative data from interviews about the participants' experiences.
Overall, the predictive learning arm didn't do as good a job at guiding the users as the direct feedback arm, but still, the users liked it better. Parker suspects that is because while the predictive arm gave absolutely no help at all at the beginning of the task, it did get better over time, and that gave the participants confidence.
"They focused on its growth, the fact that it was improving," Parker reports. "They were more invested in the system and their perception was more positive because they were seeing this system start to get better at helping them accomplish the task."